我們從無刷直流馬達的基礎出發,
目錄
一、無刷直流馬達的原理與結構
無刷馬達,顧名思義,是沒有電刷的馬達。
而因無刷馬達使用的是直流電,所以又被稱為無刷直流馬達。
然而本質上,無刷直流馬達也是一種永磁同步馬達,是因為兩者在結構及原理上都非常相似。
那麼我接下來都將以永磁同步馬達為基礎去講述無刷直流馬達。
說到無刷直流馬達的原理,首先會提到電子換向,
但我在永磁同步馬達中沒有提到電子換向,不過實際上兩者都有運用此原理來產生旋轉磁場。
什麼是電子換向?
此前,我們先說明機械換向:
在傳統的有刷直流馬達中,電刷和整流子用於改變電流方向,
從而維持轉子旋轉,此為機械換向。
而電子換向就是這一過程由電子控制器完成。
電子控制器向定子繞組供電時,會在定子周圍產生旋轉磁場,
並根據轉子位置來調整定子繞組中的電流方向,以確保轉子能夠有效地跟隨並同步旋轉,從而驅動馬達。
由此可見無刷直流馬達的原理與永磁同步馬達相同,
同樣是轉子上的永久磁體會試圖跟隨這個旋轉磁場,從而產生轉矩並驅動轉子轉動。
原理可見以下這部生動的影片來加強印象:
(以下頻道講了很多電力電子學的內容,都很生動,大力推薦)
關於無刷直流馬達的結構,可以直接將永磁同步馬達的描述搬過來:
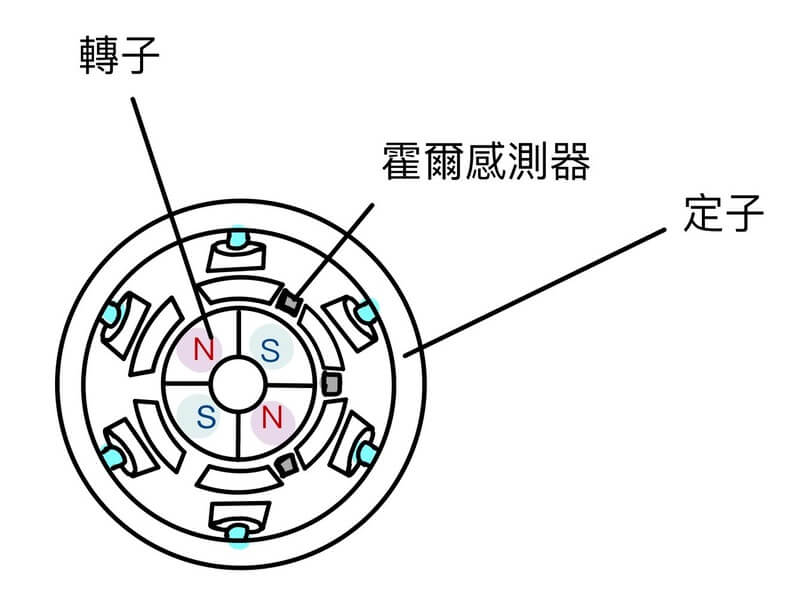
- 定子:與感應馬達相同,定子包含多個繞組,這些繞組在交流電作用下產生旋轉磁場。
- 轉子:轉子包含一個或多個永久磁鐵,這些磁鐵可以是表面貼附式或內嵌式。轉子的設計取決於應用的具體要求,例如轉速、轉矩和效率。
- 永磁體:轉子上的永磁體通常是高性能的稀土磁鐵,例如釹鐵硼,它們提供強大且穩定的磁場。
然而,與永磁同步馬達不同的是:
轉子上的永磁體排列更多注重於產生顯著的北極和南極,以產生清晰的磁極變換,
配合其換相策略(六步換相)產生方波或梯形波的電流。
因為不需要精細的感測器,
只要使用以直接且簡單的方式,確定轉子粗略位置的霍爾感測器就好,
而且霍爾感測器比編碼器便宜,在設計和製造時更容易整合進馬達系統中,
所以對於不需要高度精確控制的無刷直流馬達來說,
低成本與簡單的控制策略較符合需求。
二、無刷直流馬達的轉速
1.轉速不能用單一公式計算:
無刷直流馬達不是傳統意義上的同步馬達,
因為它們通常不會像永磁同步馬達那樣與交流電源頻率同步,
所以轉速計算方法也不能使用一個簡單的公式來計算。
轉速的控制取決於多種因素,包括馬達的設計、負載條件以及控制器的性能。
(以下皆與永磁同步馬達相同)
2. 轉速與電流:通過逆變器改變供給定子繞組的電流的頻率和大小,可以精確地控制馬達的轉矩和轉速。
這是因為定子繞組產生的旋轉磁場的速度取決於電流的頻率。
3. 速度調節範圍廣:即使改變轉速,效率也不會變,所以可以在低轉速下發揮高效率;
換句話說,無刷直流馬達能夠在從零轉速到其額定轉速甚至更高的範圍內運行,並且在整個範圍內保持高效率和良好的性能。
4. 轉速高效的原因:在不同的運轉條件下(包括低轉速)都能保持高效率。
因為轉子的磁場是由永磁體產生,而不是像感應馬達通過電流感應產生,所以不需要額外的電能。
與傳統感應馬達相比,減少了能量損耗。
5. 可直接驅動:由於無刷直流馬達可以在低轉速下提供高效率和足夠的轉矩,
它們常用於直接驅動的應用,無需額外的減速裝置。這使得整個系統更簡單、更有效率。
三、無刷直流馬達的控制
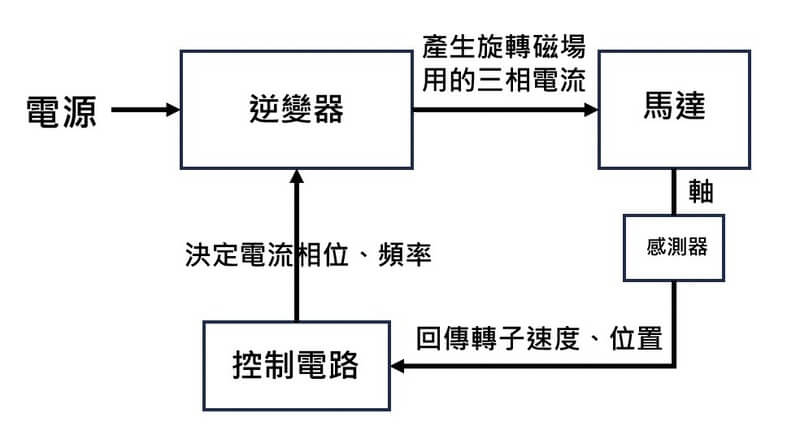
與永磁同步馬達相同,我們可以使用閉環控制:
透過感測器如旋轉編碼器或霍爾效應感測器,
來實時監測轉子的位置和速度(或是檢測旋轉中的永久磁石的旋轉角度),
並將轉子的位置和速度的資訊回傳,
我們就可以調節逆變器以產生正確頻率和相位的電流,確保電流與轉子的實際狀態保持同步。
因此,逆變器在無刷直流馬達的控制中同樣關鍵,
因為逆變器會根據感測器提供的回饋,調節交流電源的頻率和相位。
而在某些簡單的應用中,無刷直流馬達可以使用開環控制,即不依賴轉子位置的回饋信息。
(開環控制在永磁同步馬達中則不可行,
因為它無法保證電流的頻率和相位與轉子的實際狀態匹配,這可能導致轉矩產生不足或控制不準確。)
雖然無刷直流馬達的轉速可以通過改變電壓來間接影響,
但這種控制方式與有刷直流馬達的直接電壓控制不同。
無刷直流馬達的轉速控制相較之下,依賴於更複雜的電子控制,
例如使用PWM對馬達繞組供電的時間和頻率進行控制,而非僅依賴於輸入電壓的改變。
總之,無刷直流馬達的控制較為靈活,
可以根據應用的特定需求選擇開環或閉環控制。
雖然基本的電子換相原理與永磁同步馬達相似,但控制策略和應用有所不同。
四、重點整理
我們從無刷直流馬達的基礎出發,
並以永磁同步馬達做類比,介紹無刷直流馬達的轉速。
最後,說明無刷直流馬達如何透過更進一步的精確控制來適應不同的應用需求。
以下為本篇的重點整理:
- 原理與結構:無刷馬達是無電刷的直流馬達,類似永磁同步馬達。其核心在於使用電子換向,而非機械換向,來產生旋轉磁場並驅動轉子。
- 轉速:轉速控制不依靠單一公式,而是由多種因素如馬達設計、負載條件和控制器性能決定。通過改變定子繞組電流的頻率和大小來控制轉速。
- 控制:可使用閉環控制,依賴感測器如旋轉編碼器或霍爾效應感測器來實時監測轉子位置和速度。逆變器根據回饋調節電流以保證同步。也可在簡單的應用中使用開環控制。
綜合上述特點,無刷直流馬達以其高效能源利用和低維護需求,
在現代技術應用中提供了一個理想的解決方案,特別適用於那些尋求成本效益和操作簡易性的場合。
補充:應用考量
無刷直流馬達和永磁同步馬達雖然在許多應用上有相似之處,但它們在特定應用的適用性上仍有差異。
以下是兩者在應用上的主要差異:
永磁同步馬達
- 精確度和效率:永磁同步馬達通常提供更高的效率和更精確的速度控制,適用於需要高精度控制的應用,例如在高端工業自動化、精密機械、航空航天和電動車輛。
- 高性能應用:對於需要高轉矩密度和高性能的應用,永磁同步馬達通常是更佳選擇,例如在電動車和伺服系統中。
無刷直流馬達
- 成本和簡易控制:相較於永磁同步馬達,無刷直流馬達在許多情況下提供更低的成本和更簡單的控制方法,適用於成本敏感和控制要求不那麼嚴格的應用。
- 廣泛應用:無刷直流馬達廣泛用於家用電器、風扇、泵和其他商業應用,特別是在這些應用中需要高效率和長壽命。
總結
永磁同步馬達通常在需要更高效率和精確控制的應用中更為適合,
而無刷直流馬達則在成本和控制簡易性方面有優勢。
選擇哪種馬達取決於特定應用的需求和成本考量。
補充:BLDC與有刷直流馬達、PMSM的比較
無刷直流馬達(BLDC)與有刷永磁直流馬達的比較
- 結構上的反轉:在無刷直流馬達馬達中,永久磁石位於轉子上,而線圈則作為定子。這與有刷馬達的設計相反,有刷馬達通常將永久磁石放置在定子上,而轉子上則是繞組。
- 消除電刷的缺點:在有刷馬達中,電流的控制是通過物理接觸的電刷和整流子來實現的。這導致了效率損失和機械磨損。而無刷直流馬達的電流控制是通過電子方式實現,消除了電刷的磨損和火花產生的問題,從而提高了效率和壽命。
無刷直流馬達(BLDC)與永磁同步馬達(PMSM)的比較
- 結構相似性:無刷直流馬達的結構與永磁同步馬達類似,都使用永久磁鐵作為轉子來產生磁場。
- 轉子位置和回饋的差異:無刷直流馬達通常不需要精確的轉子位置回饋。它們依靠磁極的檢測來進行換相,而不是基於轉子的精確角度。(磁極的檢測也就是轉動中的永久磁石的N/S極,隨著磁極N/S的變換,該位置線圈內的電流極性(正/負)也會跟著切換。)
- 驅動電流:
- 無刷直流馬達通過改變線圈中電流的方向來適應磁極的變化(無刷馬達在旋轉時,電流方向會隨著磁石的旋轉自動切換),因此不需要接上正弦波交流電流,它們通常由方波或梯形波電流驅動,這使得控制相對簡單,製造成本較低。
- 相比之下,永磁同步馬達通常由正弦波交流電流驅動,這要求更精確的控制策略,以產生平滑且連續的旋轉力矩。
總結
- 無刷直流馬達提供了高效率、低維護成本的優勢,且在控制上相對簡單,適合於廣泛的應用。
- 與有刷馬達相比,無刷直流馬達在效率和壽命上具有明顯優勢。
- 與永磁同步馬達相比,無刷直流馬達在控制簡單性和成本效益上具有優勢,但在運行的平滑性和效率上可能略遜於永磁同步馬達。